
この記事では、FC「TAROT ZYX-M」 と 受信機「CORONA R8SF 8CH 2.4G S-FHSS」を
S-BUS接続でつなぎ、使用するまでの手順をメモしていきます。
FCの設定を始める前に、以下の作業が必要です。
・R8SF受信機を、S-BUSモードに変更しておく
・送信機(FUTABA T10J)と受信機(R8SF)をペアリングしておく
・ESCのキャリブレーションを行っておく
機体に組み付け固定してしまう「前」に行うことをお勧めします。
理由は、加速度計(Accelerometer)の値が狂ってしまっていた場合の
キャリブレーション作業は、フライトコントローラや受信機などを
取り外していたほうが行いやすいからです。
※私は組付け後だったため、キャリブレーションが結構面倒でした。
ただし、不可能というわけではないので、既に組み立ててしまった方は
そのまま進めて下さい。
以下の手順で進めれば、手戻りが無いかと思います。
1、PCに、ドライバとTAROT ZYX-M Assistantをインストール
2、ZYX-Mだけ(機体に組付ける前の状態)で、PCと接続
3、フライトコントローラの接続方式を「S-BUS」に変更して保存
4、加速度計、ジャイロの値が許容範囲内か確認
→ ダメならキャリブレーション
5、ここまでOKなら、いちど設定ソフトを終了して組付け開始
・機体にFCや受信機類を組付け固定
・受信機とFCをS-BUSチャンネルで接続
・各モーターのESCをFC(ZYX-M)に接続
6、再度、FC(ZYX-M)とPCをUSB接続し、設定ソフトを立上げ
7、基本の4ch(A/E/T/R)のキャリブレーションを行う
8、GPSモードの切替や、GoHomeのスイッチの設定を行う
PCにドライバとTAROT ZYX-M Assistantをインストール


この互換性のあるドライバー:
タロットジンバルシリーズ:
TL3T01、TL3T02、TL3D01、TL3D02、TL2D01、TL01FLIR、TL02FLIR、TL5D001
タロットFC&関連商品:
ZYX25、TL300C
ドライブインストールプログラムを実行し、指示に従って手順を終了します。 PCシステムに応じて対応するドライブファイルを選択してください。現在、Windowsシステムのみをサポートしています。





FC(ZYX-M)とPCをUSBで接続


右下が[Connected]表示になれば接続完了です。
加速度センサとジャイロを確認する
設定をいじる前に、先に方位計(ジャイロ)と加速度計を確認します。

方位計ジャイロについて
・フライトコントローラを安定させた状態で、ジャイロの値が0.2以上の場合はキャリブレーションを行ってください。キャリブレーション中はフライトコントローラを安定させたまま「OK」の表示が出るまで待機してください。
When the flight controller is stationary and the module value of gyroscope is over 0.2, you should calibrate the gyro. Procedures: keep the flight controller stationary. Click “Calibrate Gyroscope”, until the status bar shows OK.
加速度計について
フライトコントローラーが静止した状態で、加速度センサーのモジュール値が10.0を超えているか、または9.6未満の場合は、加速度センサーをキャリブレーションする必要があります。
When the flight controller is stationary and the module value of accelerometer is over 10.0 or less than 9.6, you should calibrate the accelerometer. Procedures: remove the flight controller from aircraft, and click “Calibrate Accelerometer”. Put the main controller on a level table and make sure all the six sides have been placed in turns for 2 seconds, until the status bar shows OK.
【手順】
1、航空機からフライトコントローラを取り外します
2、「Calibrate Accelerometer」をクリックしてください。
3、メインコントローラーを水平な台の上に置き、
ステータスバーに[OK]が表示されるまで2秒間程度待ちます。
4、立方体を回転させながら、の6面すべてでこの作業を行います。
※立方体各面で調整が済むごとに、LEDの点灯と点滅が変わります。
参考動画 → https://youtu.be/5nqN6XtyKQY
キャリブレーションが完了したら、「Write Flash」をクリックします。

FCをS-BUS方式に変更する
初期設定では、全チャンネルのサーボコネクタを接続するConventionになっています。
今回は配線をスッキリさせ、ノイズも減らすためにS-BUSにします。
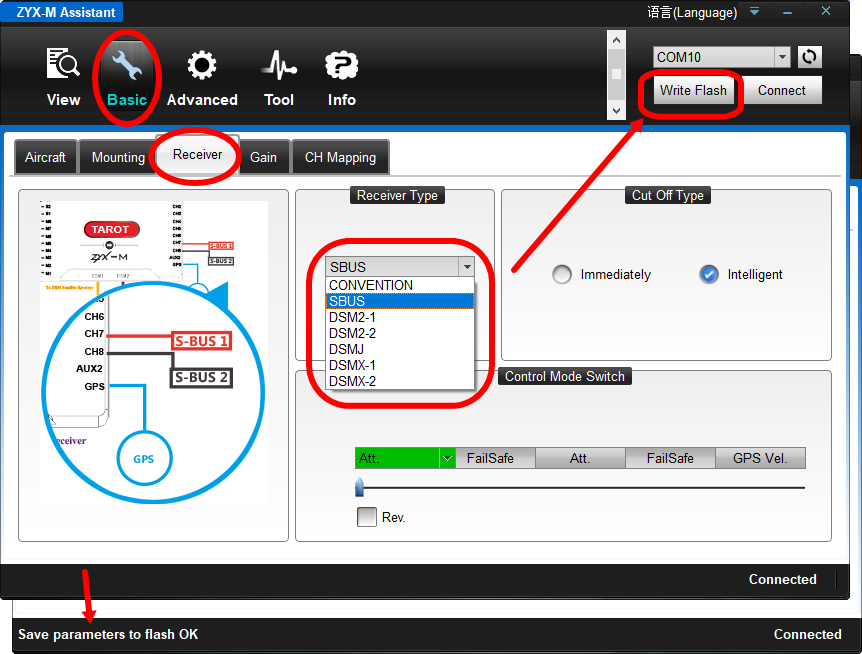
完了したら、[Write Flash]をクリックします。
ここでいったん[Disconnect]をクリックし、PCとの接続を終了します。
フライトコントローラや受信機をドローン機体本体に組み付けて、次に進みます。
S-BUS接続とチャンネルマッピング



MODEはGPSやATTIなどの飛行モードを設定します。
Basic > Reciever に行き
送信機を操作してみます
自分の意図したGPSモード切り替えが、できるか確認しておきます。

次に、GoHOMEについても、確認しておきます。
意図した操作でGoHOMEがONになるか確認します。

これでとりあえずOKでした。
GPSの搭載距離の設定
機体の重心(C.G : Center of Gravity)と各モジュールの相対距離を記入します。
GPSモジュールX、Y、Zの方向に注意が必要です。
特にZ方向は、機体よりも高い位置にポール等を使って取り付けますが、
その場合はマイナス方向の値を記入することになります。
メインコントローラまたはGPSモジュールの座標が正確でないと、振動が発生する可能性があります。
メインコントローラは今回は重心位置の場所に着けたので
「MC-X : MC-Y : MC-Z = 0:0:0」にしてあります。
やむなき事情で機体重心と異なる場所に取り付ける場合は、ここで変更します。




